|
I have joined University of Washington as research scientist at Human centered Robotics lab at Paul.G.Allen Computer Science building. I am working with Dr.Maya Cakmak in Human Robot Interaction. Finally after 5/6 years my dream of working with PR2 is fulfilled. Oh. There is Fetch and Baxter too. I am living the dream. I will be working on 1) Robotic Cleaning and 2) Robot factors project
0 Comments
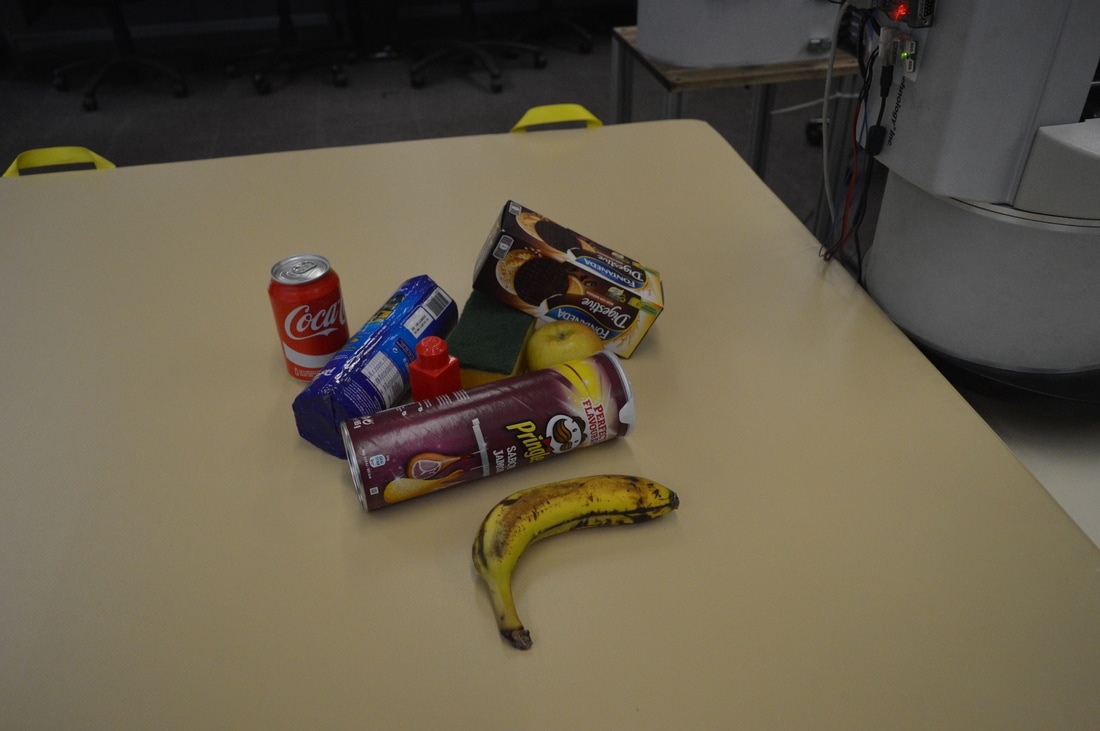
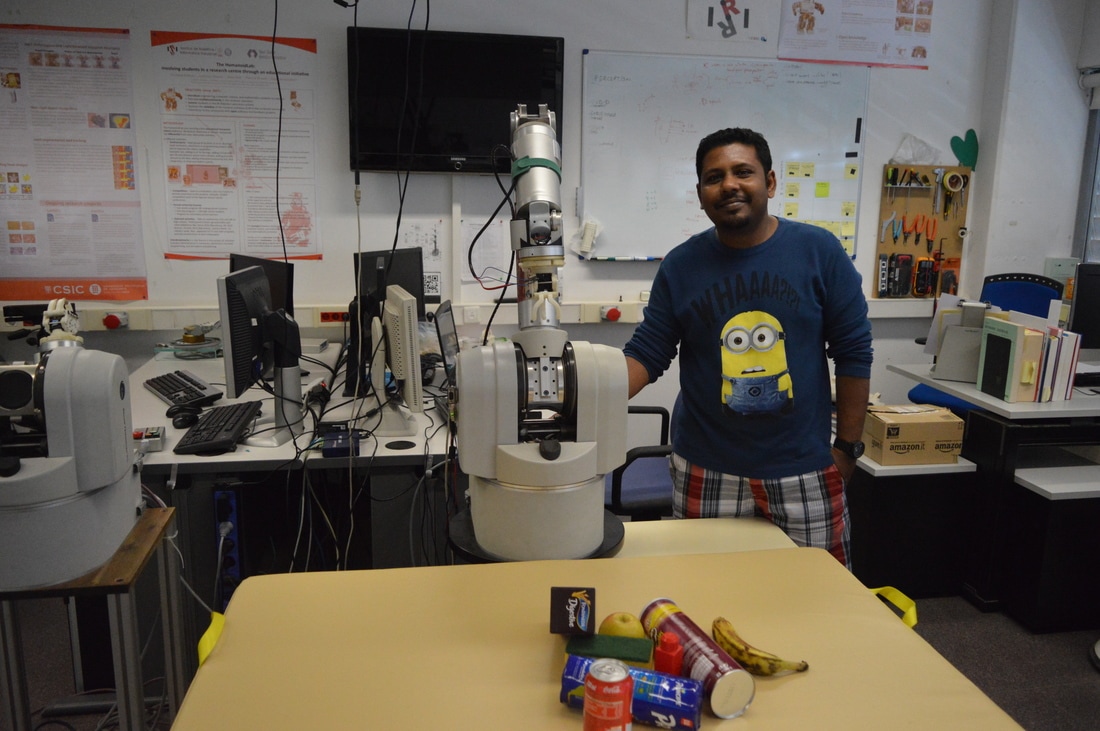
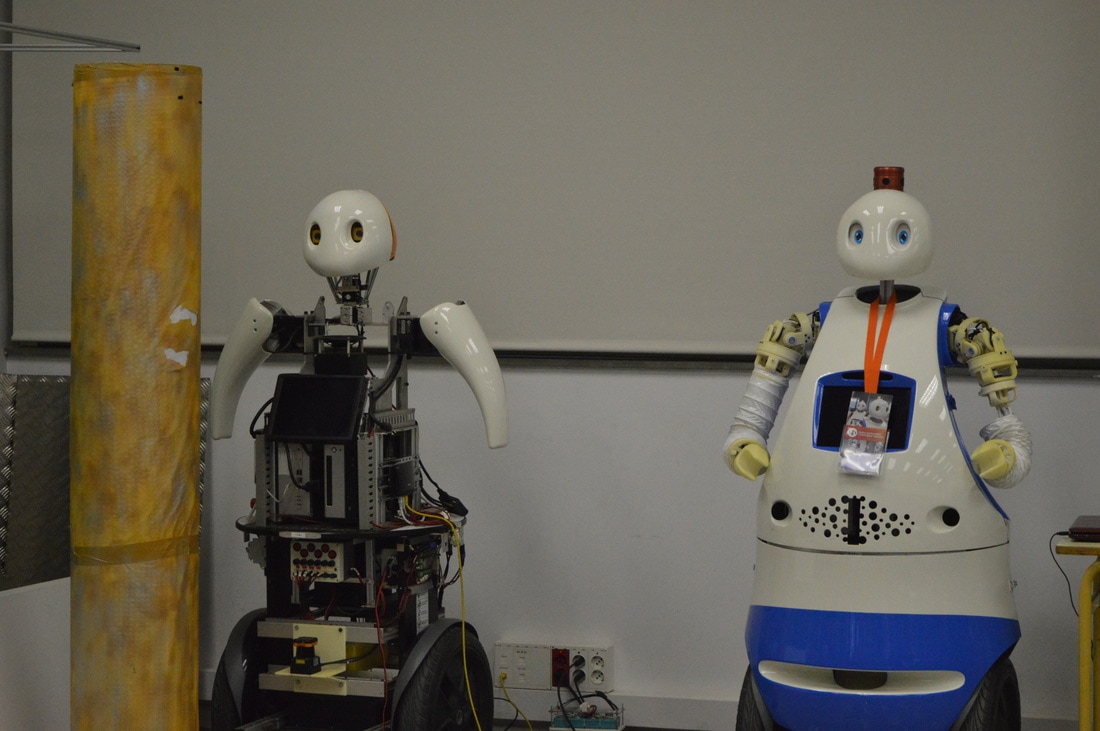
In the month of April,2017 I visited Institut de Robòtica i Informàtica industrial: IRI for research collaboration trip, where I worked with my supervisor Dr.Alba Perez Gracia and Dr.Fredrico Thomas. I have extended my grasping by superquadrics work and implemented the grasping algorithm on the WAM arm at IRI-Barcelona. I have visited a lot of nice places and met lots of awesome people in and out of the lab. It is one of the most memorable trip I have done so far. Oh. And I have done Scuba diving too....   Finally I am back after around 4 years. Yeahhhhhhhhhhh..... !!!!! Mostly the reason is that may be I have not done any significant work to be mentioned. PhD is very hectic job. I guess you already know that. Especially when the monthly scholarship <<<<<<<<<<< your monthly grocery + room rent (you have to take alternate ways to feed your beloved ones) You still want to create world class research but your body can only tolerate upto a level and after 11 PM, it does not care what grasping and manipulation technique you were thinking the whole day. It just wants some sleep. Lets leave the saddest part and start with the little bit of happiness I earned this year. I got selected for the Google Summer of Code 2016.   A new mobile manipulator has been created.Special thanks to Mr.Rajan,Mr.Manish and Mr.Sainul.Without you guys it wont be possible.As you can see in the images the robot is a combination of my previous small projetcs.The stereoscopic eyes project and the small dynamixel arm project.We are planning to make it fully ROS compatible.The Dynmixel is arm is not so powerful to pick up heavy objects .But it can pick up small glasses,empty bottles etc.That would be enough for my tabletop operations.  The eyes of the robot is a combination of two Logitech cameras fixed with a baseline of 12cm.The cameras provide quiet quality depth images of the environment.You will be wondering how would I create a depth image from two cameras?
As we are trying to implement the whole robotic system in ROS,the Robotic Operating System has got the solution. If you don;t know how to install and begin coding with ROS,write to me ,I will be writing that in another post. Today I have started a survey on social robotics.U can give your valuable ideas through the survey to me.
|
AuthorAbhijit Makhal Archives
July 2017
Categories |



























 RSS Feed
RSS Feed
